
Lap Timer and Analyser for GoPro Videos
During the past two years I’ve had the occasional pleasure of riding my motorcycles on race tracks. While I’m still far away from being fast I really enjoy working on my riding.
This led me to considering different data recording and analysis solutions. A bit down the line I realized that the GoPro cameras I already owned actually contain a surprisingly good GPS unit recording data at 18hz. To make things even better GoPro also documented their meta data format and even published a parser for it on GitHub.
I was very curious how far I could get with that data and started to play around with it. Many hours and experiments later I somehow ended up with my own analysis software and filters tuned for the camera data.
 Try the lap analyser
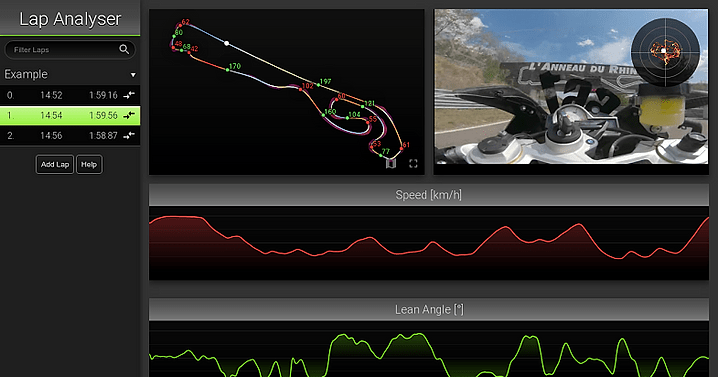
Try the lap analyserIt loads, processes and displays the data, all in a web browser.
Data Extraction and Filtering
The data extraction is performed using the gopro-telemetry library by Juan Irache.
For filtering the data I wrote a little library for kalman filters in TypeScript. The Kalman Filter book by Roger Labbe helped a lot in learning about the topic. I highly recommend it if you want to dive into the topic yourself.
In addition to the obvious line plots of speed, acceleration and lean angles I also implemented a detailed map and what I call a G Map.
Lap Map
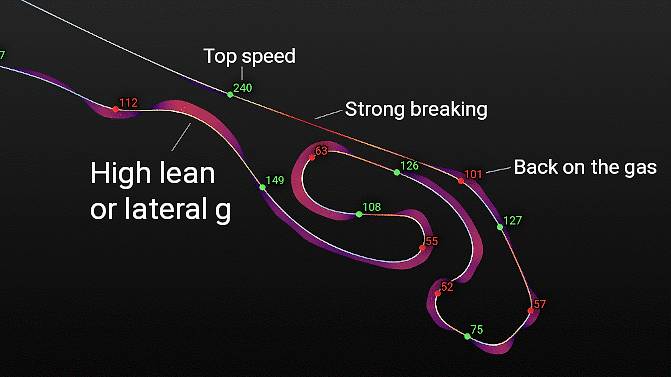
The lap map shows the line, speeds, breaking points and g forces in a spatial context. I especially like the shaded areas in the corners. They show the lateral (distance from the line) and total (color of the area) forces at play.
Looking at the map is a quick way to gauge how close to the limit one is potentially riding in each of the corners.
G-Map
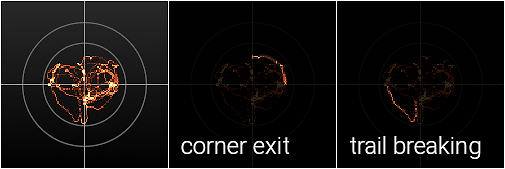
The G-Map is a histogram of the G-Force acting on the vehicle over time. It can be used to gauge how close to the limit a rider is riding.
Assuming a perfect world where vehicles have isotropic grip, the vehicle sufficient power and the rider always operating it at the limit it would trace out a perfect circle, resembling the Circle of forces.
As you can see my example above is far away from that. It shows conservative riding, always staying within the 1 g that warm track tires can easily handle. It also shows that I still have a lot to learn with regards to consistency.
It also shows that the track in question has more right turns than left.
Future Plans
There is of course a lot more that can be done here.
The GoPro also has an accelerometer and gyro which could be integrated into the filters to yield more accurate results.
The additional data would yield the actual lean angle which could then be used in combination with the lateral acceleration to gauge the effectiveness of the body position/hangoff of the rider.
I also have another version of this running on a Raspberry PI coupled to an external GPS receiver. This combination results in an all in one integrated data recording solution. One can simply connect to the WiFi hotspot of the little computer onboard the vehicle and view the most recent sessions.
It’s rather nice because it doesn’t require the camera to be running all the time and is quite simple to use. The drawback is that it requires fiddling together a bunch of hardware which I guess most people don’t want to deal with.
Disclaimer
There are two things that need to be said here.
First off this is not a perfect solution and even if it was it couldn’t definitely answer the question of how close to the limit the rider is. Factors like the track surface, weight transfer and other shenanigans are not accounted for.
Secondly, this product and/or service is not affiliated with, endorsed by or in any way associated with GoPro Inc. or its products and services. GoPro, HERO and their respective logos are trademarks or registered trademarks of GoPro, Inc.